Pojďte se s námi podívat do laboratoře zaměřené na průmysl 4.0, kde si můžete vyzkoušet, jaké to je spolupracovat s kolaborativním robotem.
Jedná se o jednu z laboratoří, kterou provozuje Katedra průmyslového inženýrství a managementu na Fakultě strojní Západočeské univerzity v Plzni. V této laboratoři se v současné době nacházejí dvě hlavní zařízení, a to kolaborativní (spolupracující) robot a automaticky řízený vozík tzv. AGV (Automated Guided Vehicle).
Určitě znáte videa z výrobních podniků (např. z automobilových závodů), kde svařovací roboti provádějí svařování sami, bez účasti člověka. Tito tradiční průmysloví roboti jsou velká, těžká, silná a robustní zařízení, která jsou obecně navržena tak, aby pracovala pro lidi, a nikoli s nimi ve spolupráci. Pracují-li na konkrétních úkolech, je nutné, aby byla zabezpečena pomocí klecí, senzorů a signalizací.
Kolaborativní roboti jsou oproti tomu stavěni tak, aby s lidmi spolupracovali a vytvářeli produkty společně. Takový kolaborativní robot např. vyzvedne předmět z krabice a vloží jej do zařízení (např. do lisu). Poté jej vyjme a předá přímo lidskému operátorovi, který pokračuje v další výrobní operaci.
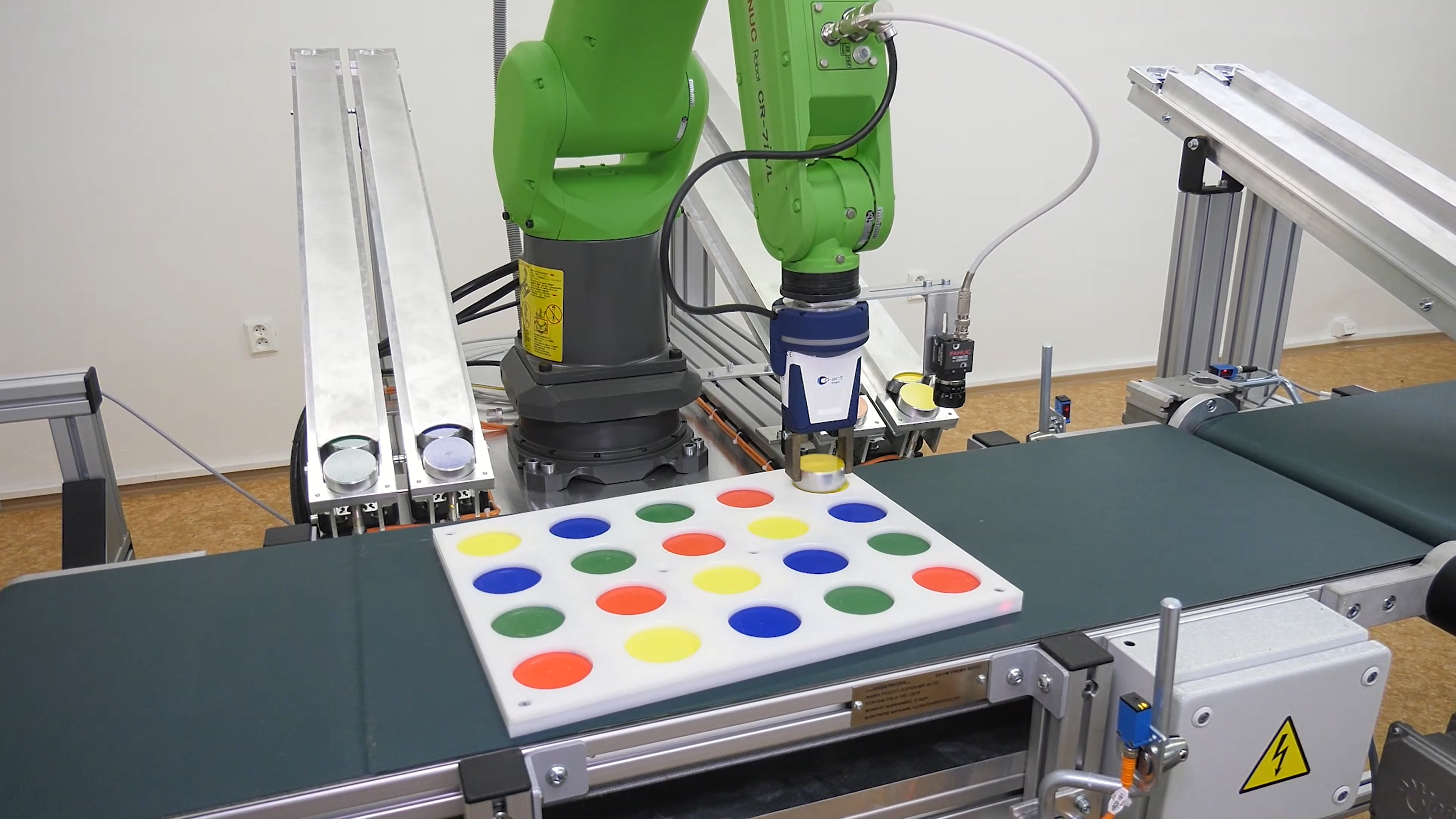
V laboratoři, kterou jsme navštívili, se nachází kolaborativní robot typu CR-7iA vyráběný japonskou společností FANUC. Robot CR-7iA je malý a flexibilní robot. Může zvedat předměty do 7 kg a provádět různé druhy úkolů. Tyto úkoly se mohou lišit – od montáže malých dílů až po cyklicky se opakující úkoly, jako je sběr a umisťování předmětů z jednoho místa na druhé.

Protože se jedná o kolaborativního robota, není zapotřebí žádné oklecování. Při kolizi s pevným předmětem nebo člověkem se robot automaticky zastaví.
Druhým průmyslovým zařízením v laboratoři je automatický vozík tzv. AGV. Toto AGV je jednosměrné, s maximální rychlostí 1 m/s, přičemž může přepravovat náklad o hmotnosti až 35 kg. Poloměr otáčení vozíku je minimálně 600 mm. AGV lze připojit pomocí WLAN a je vybaveno 24V baterií s provozní dobou až 16 hodin. Protože se AGV v reálných průmyslových aplikacích standardně používá pro interní logistické procesy, tj. přepravu produktů, odpovídá tomu také hlavní program, který je na AGV nainstalovaný. AGV používané v laboratoři zajišťuje dodávku prázdných palet ke kolaborativnímu robotu, přičemž ke stanovení své dráhy používá černou pásku a RFID štítky s instrukcí, jakou konkrétní funkci musí vozík udělat, je-li příslušný RFID štítek detekován.

Díky tomuto vybavení může laboratoř simulovat montážní proces, jehož cílem je naplnit desku s barevnými lokacemi (tzv. paletku) kovovými válci (tzv. puky) stejných barev a poté ji zase vyprázdnit. Přívoz prázdné paletky zajišťuje automatický vozík. Podle programu je naplnění či vyprázdnění paletky prováděno buď robotem, nebo člověkem na manuálním pracovišti. Při plnění paletky robotem je postup následující: V momentě, kdy je paletka dopravena pod robota, ji robot vyfotí pomocí kamery a specializovaný software detekuje pozice na paletce s příslušnými barvami. Poté se robot přemístí nad zásobníky s puky, které si také vyfotí. Rozpozná tak barvu puků v příslušných zásobnících. Následně postupně odebírá jednotlivé puky a umisťuje je správně na paletku tak, aby barvy na paletce a na puku odpovídaly. Jakmile je operace hotová, postupuje robot dále podle druhu zvoleného programu: Buď sám opět vyprázdní paletku a vrátí puky do zásobníků, nebo dopravník odešle paletku na manuální pracoviště, kde ji vyprázdní člověk. Prázdná paletka následně odjede na pozici, odkud ji může znovu vyzvednout AGV.
Laboratoř je momentálně využívána jak při výuce, kdy se studenti seznamují s principy programování robota, tak přímo studenty v rámci řešení témat jejich diplomových prací.
Chcete-li vidět kolaborativního robota i AGV v akci, podívejte se na naše video:
Zaujala Vás spolupráce s kolaborativním robotem či AGV a chtěli byste se naučit, jak ho programovat a využívat v reálném životě? Přihlaste se ke studiu na Katedře průmyslového inženýrství a managementu na Fakultě strojní Západočeské univerzity v Plzni.